On completing the preliminary research, we chalked out the basic modules that our prototype would have. At the same time we started research on novel techniques that would enable us to reduce the cost.
Through our analysis of existing active prosthetic systems we had found that one of the most expensive parts in the prosthetic device was the sensor. Through indigenously developing the sensor we would be able to reduce cost as well as assume better control over the product, keeping only the functionality we required.
We researched all the techniques that could be used to electronically pick up a signal from an amputee user, being able to understand their intent about using the prosthetic device. Among the techniques studied were electromyography (EMG), mechanomyography, electroencephalography (EEG). With all factors considered, we realized that electromyography would be the most reasonable technique to use.
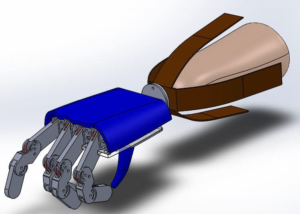
Further, we also found that many prosthetic devices used precision servo motors which exponentially increased the cost. We set about devising ways on how a simple DC motor could be used instead of a servo motor while at the same time providing the advantages that a servo motor does.
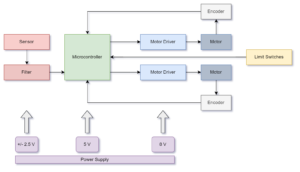
The basic system consists of four main blocks: electromyography (EMG) sensor, micro-controller, motor and power supply.
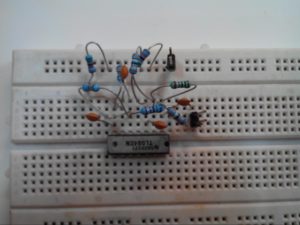
The sensor module was made using multiple operational amplifiers that consist of an instrumentation amplifier, precision amplifier, envelope detector, and an inverter. The signal is picked directly from the human muscle by attaching three electrodes and this signal is conditioned and filtered accordingly to get a smooth voltage value. The output of the sensor should be boosted sufficiently to be within the input parameters of the analog to digital (ADC) converter unit used on the microcontroller. To implement this a gain adjustment output stage operational-amplifier is used. The signal obtained after conditioning is fed to the ADC of the microcontroller.
The value of the EMG signal obtained initially is filtered with the help of a software band pass filter implemented on the microcontroller. The reading obtained after filtering is validated against previous stored readings. The microcontroller then based on the sensor readings generates a control signal for the motor driver to control the motor. It also decides the direction and brake condition of the motor based on the feedback received from the encoder connected to the motor shaft. Special care must be taken such that the motor never reaches beyond its final position on either end of the mechanism as this could damage the motor and mechanical system.
The encoder of the motor is used as feedback to the microcontroller used for position control. This is of special importance as it controls the dexterity of the mechanical finger while picking up sensitive objects. It also helps to provide feedback on the final limits of the motor.
The power supply is one of the essential blocks as the entire system runs on multiple voltages. The instrumentation amplifier needs a dual supply of +-2.5V, the later stages can run on either +-2.5V or +-5V based on the circuitry used. The microcontroller runs on a positive 5V supply while to run the motor, based on the rpm and torque required, we need to provide an 8V supply.
One of the more challenging tasks in the whole system was obtaining a clean signal from the electromyography sensor. The problem arises because the readings from muscle contraction which the EMG sensor detects are of the order of microvolts. Along with this, they are very vulnerable to electrical noise. The most dominant frequency in the human body is the 50-60Hz sine wave which is coupled into the body from all ambient electrical circuits. There could also be motion artifact generated noise due to loose electrodes at the skin interface or loose leads on the wires, involuntary reflex activity, and any other electrical device that might be in the room. Every human has skin layer of varying width. This means that every individual will give a different sensor response. The muscle density of the particular individual also plays a very important part, which could lead to premature saturation of the sensor.
 |

|
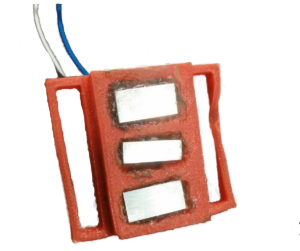
There are two types of electrodes used to obtain EMG readings, Wet Electrodes and Dry Electrodes. The most commonly used wet electrodes are Ag|AgCl which are easily available and widely used. The problem with these electrodes is that they can be used only once and thus are not feasible for use in prosthetic arm. The second type of electrodes dry electrodes consist of gold, silver or stainless steel plated metal electrodes which are placed in direct contact with the skin. Due to lack of electrolyte a proper reading is not always guaranteed and varies greatly from person to person. We tested out both electrodes and found the response of the wet electrodes to be superior. Ideally we would want a circuit that could be reconfigurable based on requirement.