Introduction
In medicine, a prosthesis is an artificial device that replaces a missing body part, which may be lost through trauma, disease, or congenital conditions. Prosthetic limbs are incredibly valuable to amputees because they can help restore some of the capabilities lost with the amputated limb. Although prosthetic limbs have still not advanced to the point where they can rival the functionality provided by biological limbs, the capabilities they do provide can be significantly empowering.
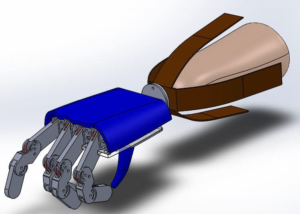
Arm prosthetics, though being of wide variety, can be broadly categorized into three types: passive, body-powered and externally-powered prosthetics. Passive prosthetics are static molds having no movement. They are purely aesthetic and cannot be used in a versatile environment. Body-powered prosthetics use cables and harnesses strapped to the individual to mechanically maneuver the artificial limb through shoulder and arm movement. Though the user of these prosthetics experiences direct control and feedback through its mechanical operation, the continuous usage of the prosthetic can be fatiguing. Externally-powered artificial limbs are an attempt to solve this problem by using a battery and an electronic system to control the arm movement, incorporating sensing of user intent towards controlling the prosthesis.
Comparative Analysis of Existing Systems
Before we began with the design aspect of this project, we performed a comprehensive survey of all the existing solutions. This helped us develop an understanding of what was the cost to affordance ratio that these solutions provided.
Nevedac Prosthetic
Nevedac Prosthetic Centre, India is a charitable organization based in Chandigarh. Founded in 1973 with support from the govt. of Punjab, NPC provides prosthetics to many disabled people. These prosthetics include passive prosthetics, mechanical prosthetics (body powered) as well as electronically powered prosthetic hands. NPC has helped improve many lives by allowing otherwise disabled people to get back to work and be a productive part of society.
 |
 |
One of the major drawbacks of Nevedac prosthetics is its limited reach. Though the prosthesis provided are cost-effective and useful, being a charitable organization, NPC is unable to cater for the millions of amputees in the country through government funding alone.
Liberating Technologies
The prosthetic hands provided by liberating technologies is a body powered single DOF hand. It consists of a cable that is connected to the harness. As the cable is pulled, the hand is opened. The hand closes automatically by spring force. The functionality of this hand is therefore, quite limited. A higher capability version of this is also available that replaces the body powered system with an electronic system controlled by a myoelectric sensor. The functionality however, remains the same as it has the same DOF.

Comparative Analysis

Understanding User Needs
After a comprehensive analysis of what was available, we looked at what users actually required. We realized that one way to reduce cost but still have an effective prosthesis would be by providing only the functions that the users needs. For this, it was first important to understand user needs, especially in the context that we were working in. We performed interviews and conducted open ended surveys towards achieving this goal.
The Rotary Club of India provides the LN4 prosthetic hand free of cost to individuals who need them. For this, it hosts day long events where people from all over the state of Maharashtra come and are given a prosthetic device along with basic training on how to use it. We contacted a representative from the Rotary Club and received permission to attend this event in order to meet with people who were using the LN4 hand as well as those who were waiting to get one.
It was an eye-opening experience as we realized that people had travelled for up to 16 hours to be able to receive the LN4 prosthetic hand. Talking with the officials of the Rotary Club, we found that there was always a shortage where supply never met demand. All this further invigorated our drive to come up with a solution.

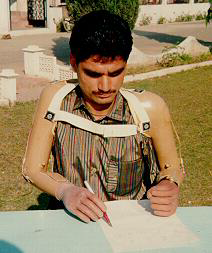
The LN4 is a body powered prosthetic. It has a ratchet mechanism and pushing the palm of the prosthetic arm back releases the latch. We found that people used it to be able to perform everyday activities like brushing teeth, holding something rigid and for physical support. With some practise, individuals were able to use this to write as well. We met with one individual who was actually driving a two wheeler motor vehicle using this body powered prosthesis. The biggest complaint users had was that the device took too much time to operate and was inefficient. Every activity required the use of the other (able-bodied) hand.
This was a design insight that we took forward. The prosthetic hand we made would not have as many degrees of freedom that a biological hands provides, but it would be able to automate the clasp and release which was the core functionality and also biggest drawback of the LN4.
We also had the opportunity to collaborate with the Armed Forces Medical College of India (AFMC). This organization has a department situated in the cantonment area of Pune which primarily caters to amputees and their wellbeing. Through speaking with the doctors involved, we were able to understand the current scenario on assistive technology. This collaboration also exposed us to the use of sensors in active prosthetics and gave us access to industrial grade myoelectric sensors.
Preliminary Design
On completing the preliminary research, we chalked out the basic modules that our prototype would have. At the same time we started research on novel techniques that would enable us to reduce the cost.
Through our analysis of existing active prosthetic systems we had found that one of the most expensive parts in the prosthetic device was the sensor. Through indigenously developing the sensor we would be able to reduce cost as well as assume better control over the product, keeping only the functionality we required.
We researched all the techniques that could be used to electronically pick up a signal from an amputee user, being able to understand their intent about using the prosthetic device. Among the techniques studied were electromyography (EMG), mechanomyography, electroencephalography (EEG). With all factors considered, we realized that electromyography would be the most reasonable technique to use.
Further, we also found that many prosthetic devices used precision servo motors which exponentially increased the cost. We set about devising ways on how a simple DC motor could be used instead of a servo motor while at the same time providing the advantages that a servo motor does.
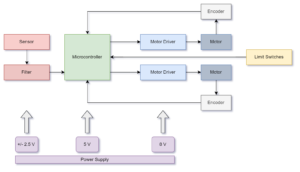
The basic system consists of four main blocks: electromyography (EMG) sensor, micro-controller, motor and power supply.
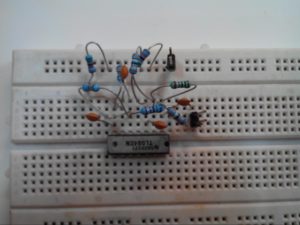
The sensor module was made using multiple operational amplifiers that consist of an instrumentation amplifier, precision amplifier, envelope detector, and an inverter. The signal is picked directly from the human muscle by attaching three electrodes and this signal is conditioned and filtered accordingly to get a smooth voltage value. The output of the sensor should be boosted sufficiently to be within the input parameters of the analog to digital (ADC) converter unit used on the microcontroller. To implement this a gain adjustment output stage operational-amplifier is used. The signal obtained after conditioning is fed to the ADC of the microcontroller.
The value of the EMG signal obtained initially is filtered with the help of a software band pass filter implemented on the microcontroller. The reading obtained after filtering is validated against previous stored readings. The microcontroller then based on the sensor readings generates a control signal for the motor driver to control the motor. It also decides the direction and brake condition of the motor based on the feedback received from the encoder connected to the motor shaft. Special care must be taken such that the motor never reaches beyond its final position on either end of the mechanism as this could damage the motor and mechanical system.
The encoder of the motor is used as feedback to the microcontroller used for position control. This is of special importance as it controls the dexterity of the mechanical finger while picking up sensitive objects. It also helps to provide feedback on the final limits of the motor.
The power supply is one of the essential blocks as the entire system runs on multiple voltages. The instrumentation amplifier needs a dual supply of +-2.5V, the later stages can run on either +-2.5V or +-5V based on the circuitry used. The microcontroller runs on a positive 5V supply while to run the motor, based on the rpm and torque required, we need to provide an 8V supply.
One of the more challenging tasks in the whole system was obtaining a clean signal from the electromyography sensor. The problem arises because the readings from muscle contraction which the EMG sensor detects are of the order of microvolts. Along with this, they are very vulnerable to electrical noise. The most dominant frequency in the human body is the 50-60Hz sine wave which is coupled into the body from all ambient electrical circuits. There could also be motion artifact generated noise due to loose electrodes at the skin interface or loose leads on the wires, involuntary reflex activity, and any other electrical device that might be in the room. Every human has skin layer of varying width. This means that every individual will give a different sensor response. The muscle density of the particular individual also plays a very important part, which could lead to premature saturation of the sensor.
 |
|

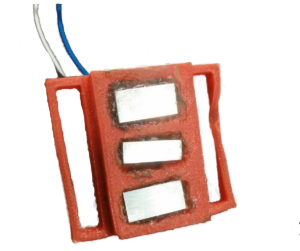
There are two types of electrodes used to obtain EMG readings, Wet Electrodes and Dry Electrodes. The most commonly used wet electrodes are Ag|AgCl which are easily available and widely used. The problem with these electrodes is that they can be used only once and thus are not feasible for use in prosthetic arm. The second type of electrodes dry electrodes consist of gold, silver or stainless steel plated metal electrodes which are placed in direct contact with the skin. Due to lack of electrolyte a proper reading is not always guaranteed and varies greatly from person to person. We tested out both electrodes and found the response of the wet electrodes to be superior. Ideally we would want a circuit that could be reconfigurable based on requirement.